
https://www.engadget.com/2018/07/05/mit-cheetah-3-robot-moves-while-blind/
MIT
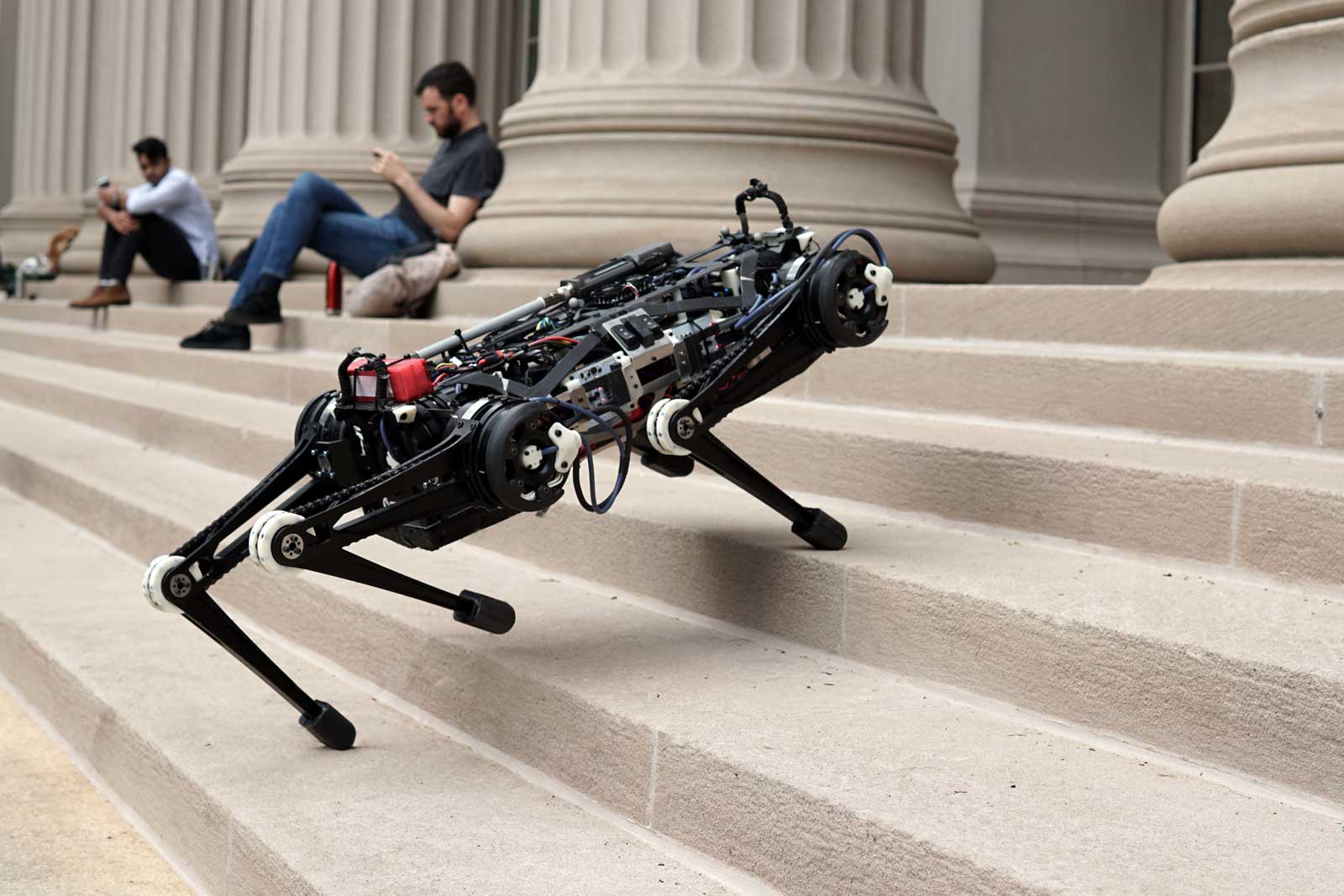
Many robots depend on cameras and other visual sensors to find their way around the world. But that’s not always realistic — it can be too dark, too chaotic or even play tricks. Thankfully, MIT is prepared. The latest version of its Cheetah robot, Cheetah 3, can run, climb and even jump using contact detection alone — effectively, while it’s blind. The cat-like automaton relies on a pair of algorithms to both ‘feel’ its way around (much as you would feel your way to the bathroom in the middle of the night) and figure out the best way to move forward.
The first algorithm uses accelerometers, gyroscopes and leg joint positions to calculate the probabilities of legs making contact, generating force and getting caught in mid-swing. If Cheetah steps on an unexpected obstacle, it can determine whether each leg should push down or lift away. The second algorithm, meanwhile, predicts the robot’s positioning so that it can quickly react to its situation. Even if you push the robot around, it’ll know how to get back on track.
MIT doesn’t expect robots to rely exclusively on this technology. Most likely, it would be used as a backup for moments when a robot either can’t see properly or hits an obstacle it wasn’t expecting (say, something interfering with its hind legs). That could make it useful for power plant inspections, remote rescues and other dangerous situations where there’s no help if a robot gets stuck or falls over.
via Engadget http://www.engadget.com
July 5, 2018 at 01:21PM